Por fin es un hecho, ya se ha finalizado el proceso de creación de Neurobot, robot que se creo para trabajar con pacientes neurológicos como afectados de daño cerebral adquirido y otros tipos de patologías cerebrales.
Todo comenzó con un prototipo en que se implicó el IES Virgen de las Nieves de Granada, coordinando el proyecto por Federico Coca y Jose Maria Torralba, donde se implicarón varios alumnos entre otros Francisco Mendoza y Juan Carlos Joyas dando como resultado del primer ensayo al cerebrot 1.0:

Finalmente y tras muchos esfuerzos, el prototipo ha subido de nivel, Createc 3D ha cogido las riendas del mismo y se ha estado probando en Agredace (Asociación Granadina de Familias por la Rehabilitación del Daño Cerebral Adquirido) donde hemos podido ir probando y perfeccionándo sus diferentes caracteristicas.
Neurobot está creado en base a un nuevo enfoque en la rehabilitación, impreso mediante el uso de la tecnología 3D. La función principal es la de crear aprendizajes para posteriormente inhibirlos y aprender otros nuevos, una función de control cognitivo ampliamente presente en nuestra vida diaria, que se ve afectada en este tipo de pacientes.
 El manejo de este dispositivo a través de un circuito con obstáculo y una serie de instrucciones de movimiento requiere el uso de varias capacidades cognitivas y basta tener cierto grado de movilidad en una mano para controlarlo. Por ejemplo, tapar parte del circuito de manera que el paso del robot por ese tramo quede oculto implica que el paciente use su capacidad de abstracción. Además, cuenta con un interruptor que permite invertir las señales de dirección, es decir, cuando el paciente controla el robot hacia la derecha, cerebrot gira a la izquierda o si, por ejemplo, queremos frenar el robot aceleraría.
El manejo de este dispositivo a través de un circuito con obstáculo y una serie de instrucciones de movimiento requiere el uso de varias capacidades cognitivas y basta tener cierto grado de movilidad en una mano para controlarlo. Por ejemplo, tapar parte del circuito de manera que el paso del robot por ese tramo quede oculto implica que el paciente use su capacidad de abstracción. Además, cuenta con un interruptor que permite invertir las señales de dirección, es decir, cuando el paciente controla el robot hacia la derecha, cerebrot gira a la izquierda o si, por ejemplo, queremos frenar el robot aceleraría.
Realmente se trata de una tarea de interferencia tipo Stroop pero en lugar de leer palabras en un papel la interferencia se produce en el espacio con lo cual trabajamos varias habilidades cognitivas al mismo tiempo. Por tanto, podemos decir que el interés en las tareas audiovisuales, uso de videojuegos o en concreto mediante el trabajo con el robot es superior respecto a otros métodos más clásicos y suponen nuevas herramientas terapéuticas a tener en cuenta que ayude a generalizar los aprendizajes. Además, se trata de una metodología más flexible, variando las instrucciones para adaptarse a las necesidades individuales.
En esta ocasión el manejo se realiza a traves de una aplicación móvil:

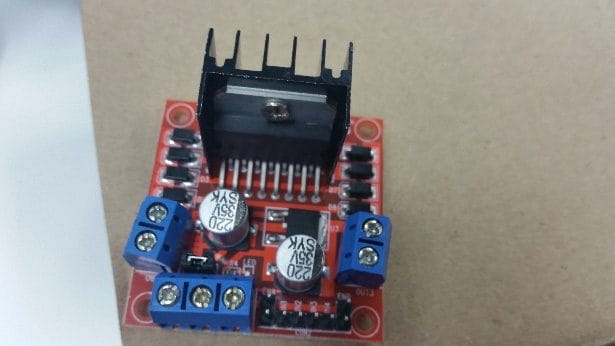
La electronica usada ha sido un puente H para el control de los motores y una placa Zum de bq, similar a un arduino con bluetooth:

Y unos motores de corriente continua:

Un agradecimiento especial para Victor Cano y Rafael Hurtado que finiquitaron el proyecto que esperemos ayude a mucha gente y siga evolucionando y mejorando con el tiempo.